ZEB GO Laser Scanner
Quick Summary

The ZEB Go Handheld 3D Scanner is a lightweight and portable LiDAR (Light Detection and Range) point cloud scanner. It uses a rotating and spinning laser that shoots hundreds of laser beams reflecting back to the ZEB Go and calculates how long the beam took to return to the scanner. This is how the 3D point cloud scan is made.
Use Case
Use the ZEB Go if you are scanning somewhere remote, wanting a portable scanner and scanning smaller areas that aren’t as accurate.
Transparent/Mirrored surfaces will be captured.
Scanning Parameters
| Distance | 30m |
| Accuracy | 10-30mm |
| Raw Data File Size | 100mb/minute |
| Points per second | 43,000 |
| Colour | Yes (with ZEB Cam) |
The Kit
To create a scan with the ZEB Go you will need the following items:

- ZEB Go Scanner + battery
- Android Phone + charger
- ZEB Go main cable
- ZEB Go PC
All of these items are housed within the hardcase carry case.
Once you are ready to process your scans please use a separate laptop to process the scans on the desktop Geoslam software.
Scanning
Plan ahead what and where you are going to scan. It is best to plan out how you will approach the scanning. The route you will take to create the scan, how many scans you will need and what will be happening as you are scanning.
Key Principles to understand:
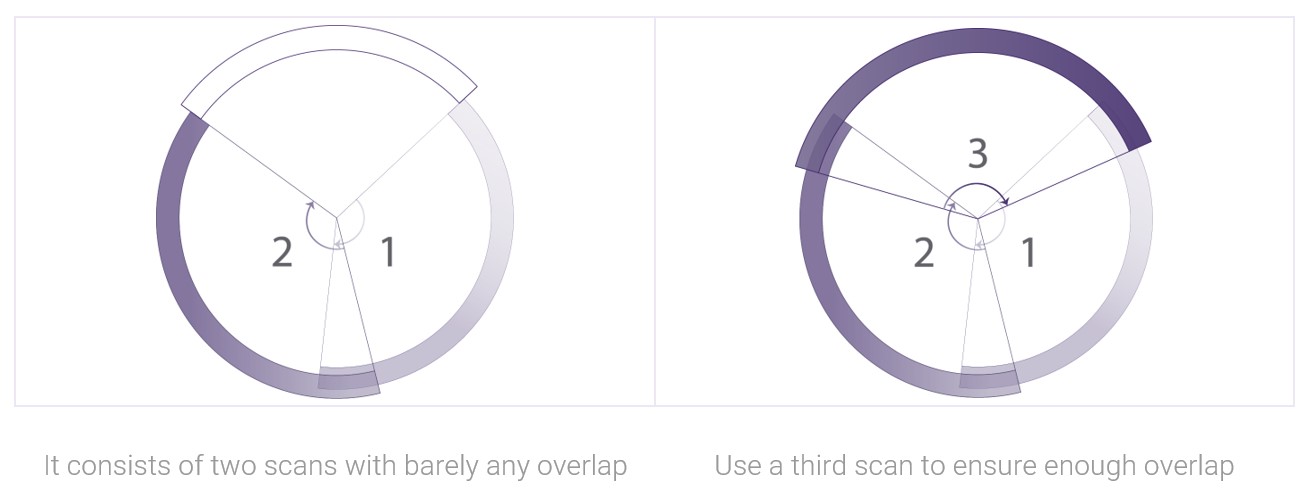
Occlusion and Overlap
Understanding that the sensors are like 'eyes', they can only see what is in front and nothing 'behind' or 'over' object. Similar to how you can move your viewpoint to look behind an object, a sensor will need to be physically moved to ensure it can capture information that is occluded beyond the objects.
Additionally, for the scans to align properly, the environment must allow for the scanner to be positioned so that each scan will have enough overlapping information. There are manual alignment tools if necessary though.
Light and Vision
Regardless of the technology, whether it be the lens of the camera in Photogrammetry or the light sensor of the Artec 3D Scanner, all these technologies have sensors that receive light as information.
Light comes from light sources in the environment. The light rays bounce off objects and that is how our eyes and the sensors 'see,' forming a 2D or 3D understanding of the image. However, not all objects behave in the same manner in relation to light and it is critical to take notes as you scan.
Reflective Objects
Reflective objects do not work well either as they fully reflect light from other objects. We understand the context of a mirror, but the technology does not recognise a mirror and it will read information 'in' the mirror as true objects in 3D space, and not a reflection on a surface
Transparent Objects
Transparent/Translucent objects do not reflect all light rays except only for small traces. These types of objects allow light to pass through them, rendering them mostly invisible to a sensor.
- Detailed instructions are provided in the carry case.
1. Scan
Take the ZEB Go on-site to scan your environment using GeoSlam Online on the Android phone via Chrome.
2. Process
To further clean up the point cloud, open GeoSlam Online on the laptop, make sure you are connected to the local network, and download the scan as a .geo. Import the scan into the desktop version of GeoSlam for registration, floorplan extraction and exporting options.
3. Re-Charge
Before returning the ZEB Go scanner, please charge the batteries and phone with the chargers in the carry-case.