Cloud Compare
Quick Summary
![]()
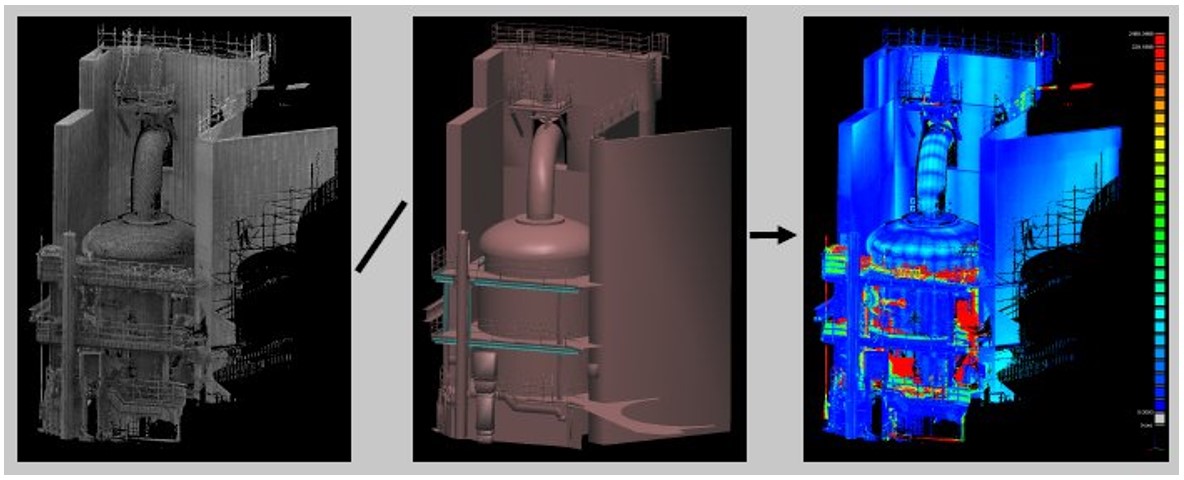
CloudCompare is a 3D point cloud (and triangular mesh) editing and processing software. It has been originally designed to perform a comparison between two dense 3D point clouds (such as the ones acquired with a laser scanner) or between a point cloud and a triangular mesh. It relies on a specific octree structure dedicated to this task. Afterwards, it has been extended to a more generic point cloud processing software, including many advanced algorithms (registration, resampling, colour/normal/scalar fields handling, statistics computation, sensor management, interactive or automatic segmentation, display enhancement, etc.).
Installation
CloudCompare is Free software.
Download and Install CloudCompare available here, and select the version in the product tile.
Download CloudCompare
User Interface
CloudCompare relies on Qt and OpenGL.
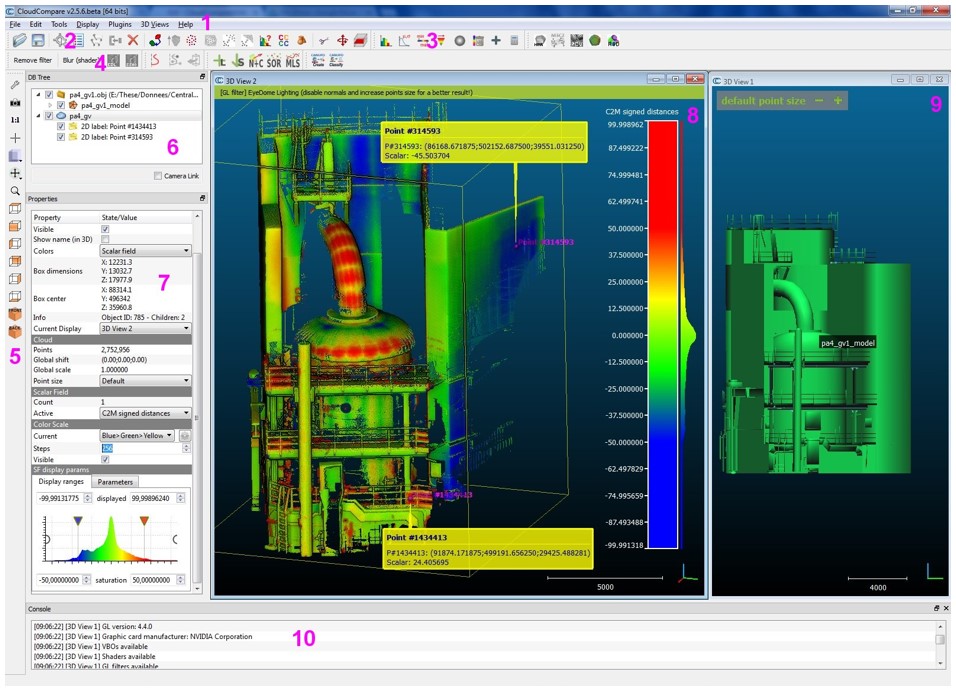
1. Menus
- File (open, save, quit, etc.)
- Edit (edit selected entities and their features - colours, normals, scalar fields, etc.)
- Tools (segmentation, registration, projection, etc.)
- Display (display-related options)
- Plugins (loaded plugins)
- 3D Views (3D views management)
- Help (about, help, etc.)
2. Main toolbar (quick access to main editing and processing tools: open/save, point picking, clone, etc.)
3. Scalar fields toolbar (quick access to scalar fields related tools)
4. Plugins toolbar (quick access to currently loaded plugins - standard and OpenGL shaders)
5. View toolbar (quick access to display-related tools)
6. Database tree (for selection and activation of entities and their features)
7. Properties view (information on the selected entity)
8. Default 3D view
9. Another 3D view (created with 3D Views > New
10. Console
Here is the first introductory tutorial video:
Documentation
For a (maybe not so) exhaustive list of CloudCompare functionalities check the documentation page (especially the wiki).
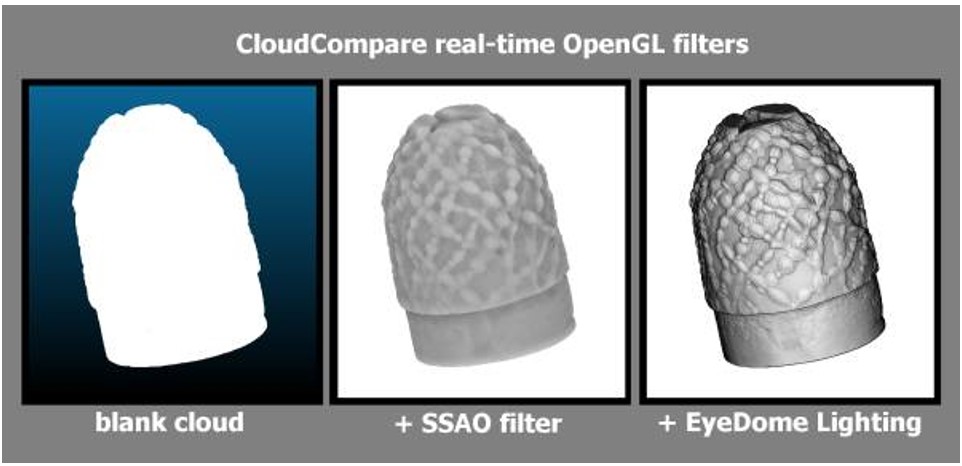
Plugins
CloudCompare also supports an extension mechanism based on plugins. 2 types of plugins are available:
- Standard plugins (algorithms)
- OpenGL filters plugins (advanced shaders)
See the complete list of plugins here.
Supported file formats
CloudCompare can load many open point cloud formats (ASCII, LAS, E57, etc.) as well as some manufacturer's formats (DP, Riegl, FARO, etc.). It can also load triangular meshes (OBJ, PLY, STL, FBX, etc.) and a few polylines or polygon formats (SHP, DXF, etc.). Some SfM formats are also supported (Bundler, Photoscan PSZ, etc.).
See the complete list of supported formats here.